Product Details
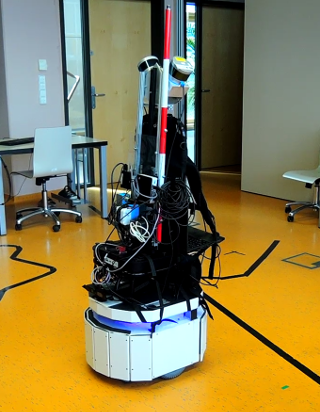
PatrolBot self driving for map making based on laser and asus depth sensors
Created: 2018
Chavez Plascencia Alfredo, Ph.D.
ROS, localization, map making
Autonomous driving for map making of a clutter environments is a complex task due to the robot has to deal with precise measurements of the environment, in other words the robot must have a good field of view of the environment in turn. This proposal mainly presents the functioning and description of the ROS package called patbot_self_driving that has to do with the navigation of a PatrolBot in the empty area of a indoor environment while making a 2D map by means of a laser hokuyo and a 3D depth asus sensors.
In order to extend the functionality of the application, a mapping bagpack solution was mounted on the robot. This solution is novel a way of odometry estimation from velodyne lidar point cloud scans. And, it is able to make a 3D map of the environment by means of two velodyne lidars which are placed on the top with a certain inclination to cover the whole area.

UPGM
{kind=link}