Result Details
Přesné tříosé polohování pro ověřování přesnosti optických systémů
Zemčík Pavel, prof. Dr. Ing., dr. h. c., UAMT (FEEC), DCGM (FIT)
Kršek Přemysl, doc. Ing., Ph.D., UTKO (FEEC)
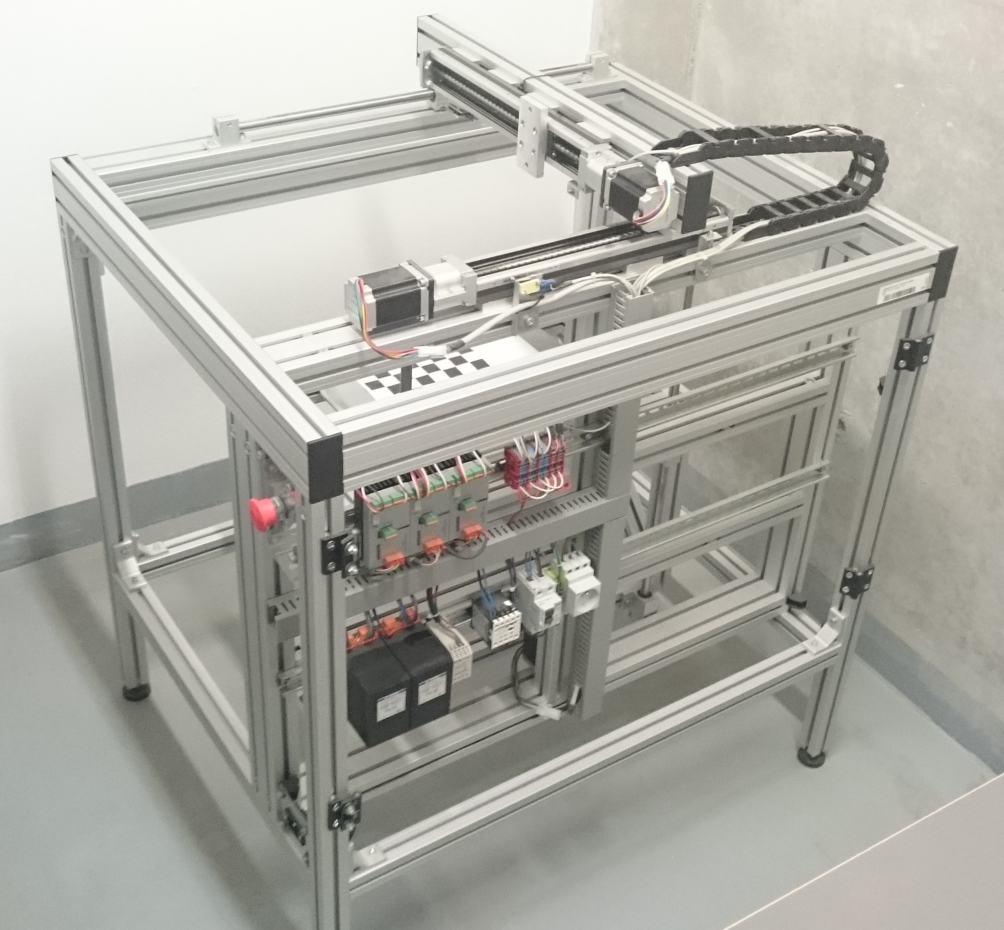
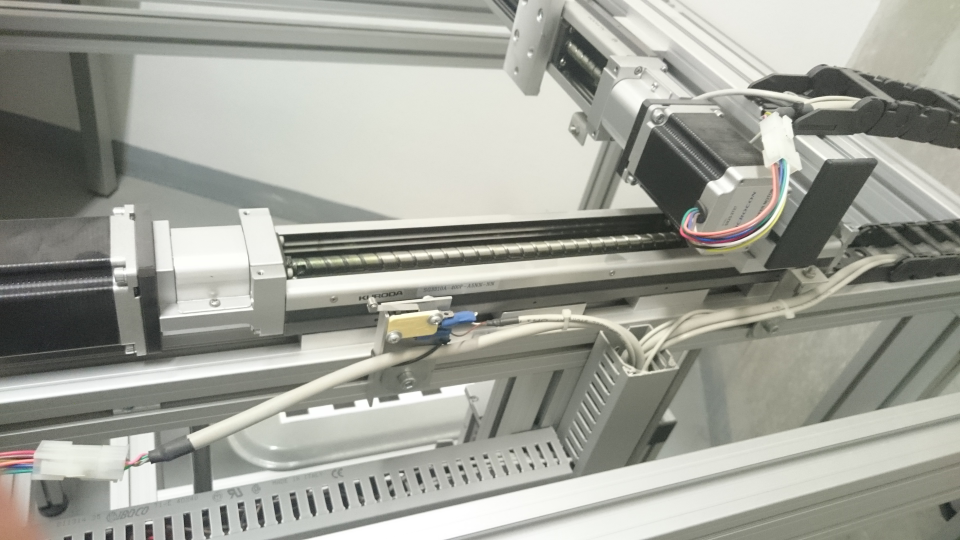
Jedná se o funkční vzorek zařízení pro tříosé pozicování v prostoru pro účely měření a pořizování datových sad s přesnou anotací aktuální pozice. Příkladem použití je experimentální ověření algoritmů pro zpracování obrazu, např. kalibrace a lokalizace kamery v prostoru. Na pohyblivou hlavu stroje je možné upevnit kameru, nebo jiný měřící prvek, který je následně možné polohovat ve 3D prostoru pomocí ovládacího software. Dostatečně přesný pohyb v osách X, Y a Z zajišťují kvalitní kuličková lineární vedení osazená krokovými motory s převodovkou. Jednotlivé osy jsou řízeny nezávisle.
The device is a functional sample for three-axis positioning in space for the purpose of measuring and capturing data sets with precise annotations of the current position. An application example is the experimental verification of image processing algorithms, e.g. camera localization and calibration in space. A camera, or other sensor, can be mounted on the movable head, which can be further positioned in 3D space using the control software. Precise movement in the X, Y and Z axes is guaranteed by using high quality ball linear motion slides equipped with stepper motors with a gearbox. The individual axes are controlled independently.
tříosé polohování, krokové motory, lineární vedení, kalibrace optických systémů, zpracování obrazu
triaxial positioning, step motors, linear motion slide, optical systems calibration, image processing
Laboratoř L017.1 (1. suterén), budova FIT VUT v Brně, Božetěchova 1, 612 66 Brno, Česká republika
For information and license conditions contact please: Mgr. Michaela Burianová, Research Centre of Information Technology, Faculty of Information Technology, Brno University of Technology, Božetěchova 1, 612 66 Brno, 541 141 470, http://www.fit.vutbr.cz/~burianova/
- png Celkový pohled na tříosé polohovací zařízení I. 889 kB
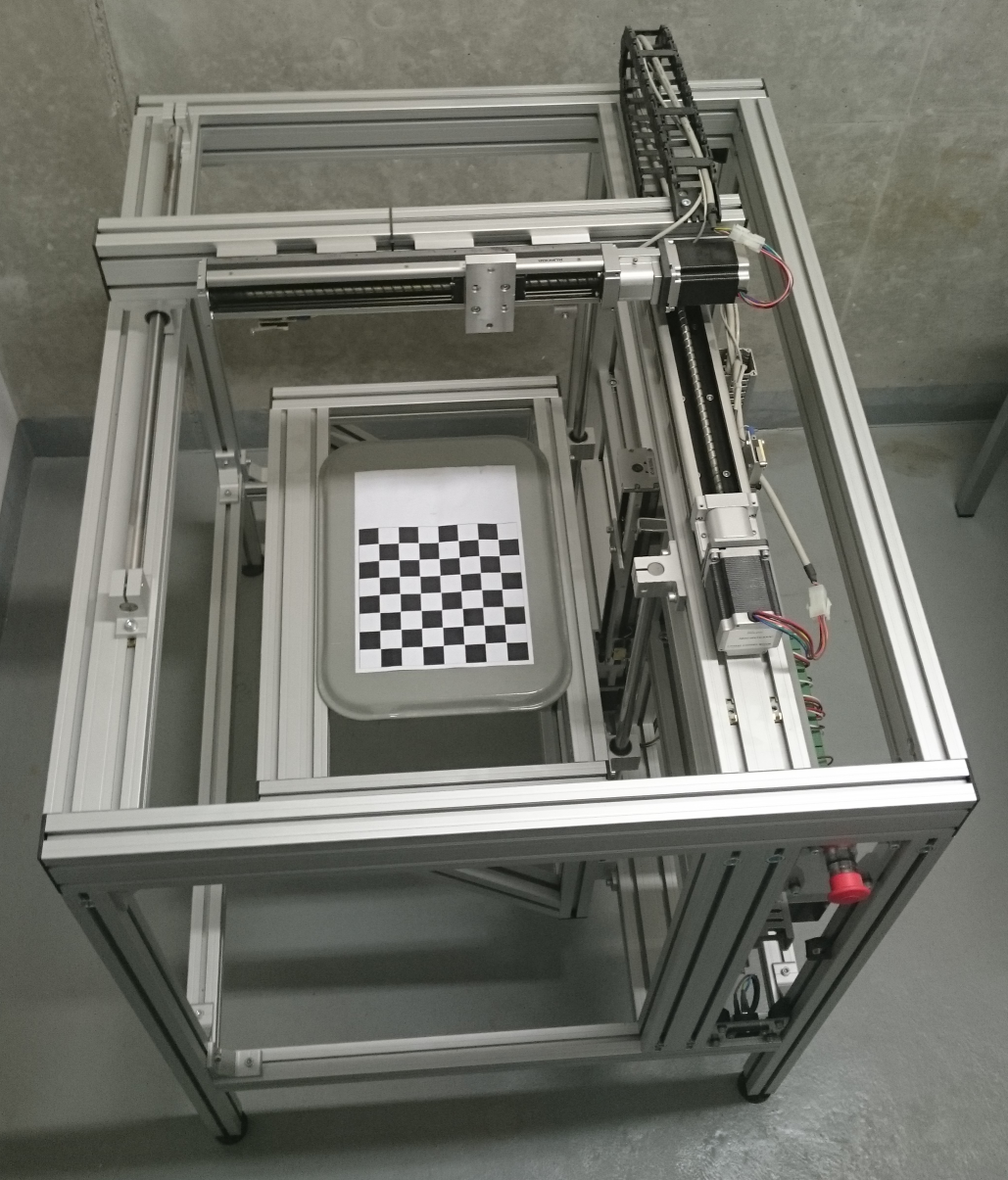
- png Celkový pohled na tříosé polohovací zařízení II. 1 MB
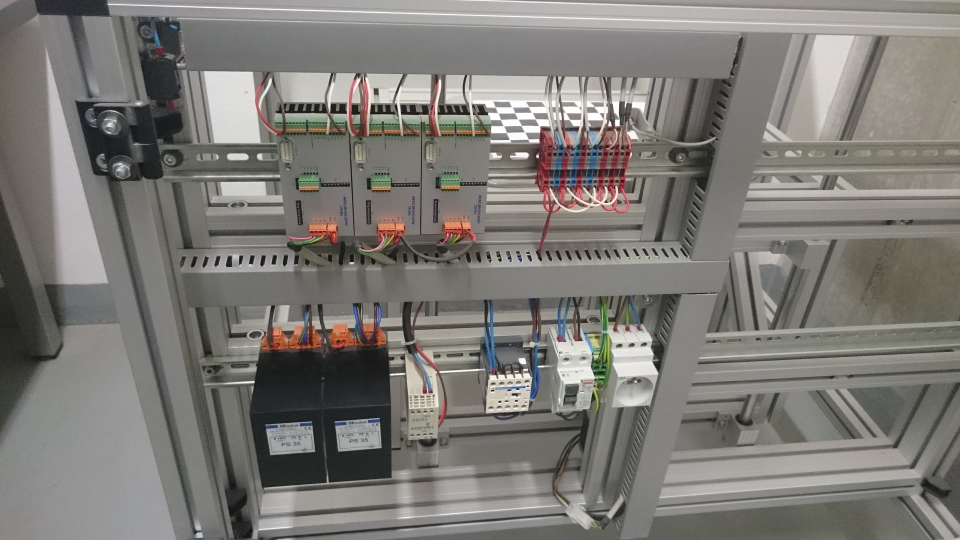
- png Detail provedení a zapojení elektroniky. V horní části jsou patrné tři řídící jednotky pro ovládání krokových motorů jednotlivých. 600 kB
- png Detail provedení hlavy s přípravkem pro uchycení testovaného zařízení (např. kamery). 453 kB
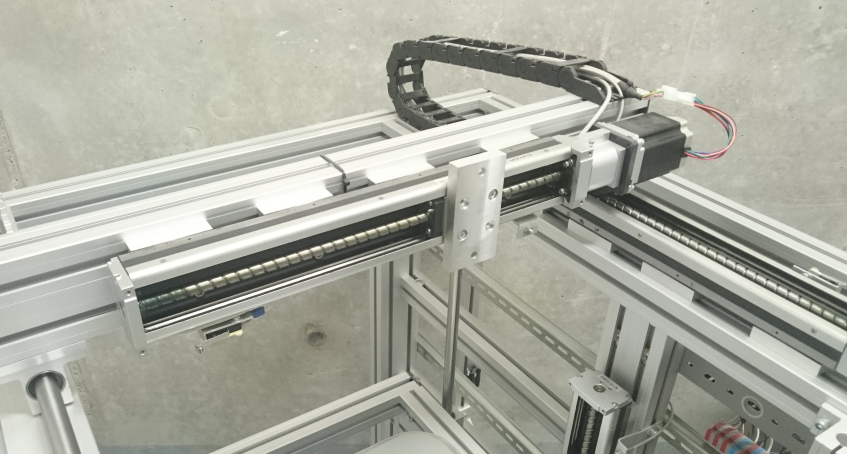
- png Detail provedení lineárních vedení s krokovými motory a koncovými spínači - vlevo mechanický doraz, vpravo indukční snímač pro přesné zkalibrování stroje při inicializaci. 543 kB
- wmv Ukázka pořízeného videa pro testování přesnosti řešení pro kalibraci a real-time lokalizaci kamery v prostoru s využitím ruzných vizuálních markerů, v tomto případě se vzorem šachovnice. 3 MB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}