Product Details
Venkovní robotická platforma pro snímání senzorových dat a experimentální ověřování algoritmů 3D rekonstrukce
Created: 2015
Beran Vítězslav, doc. Ing., Ph.D. (DCGM)
Španěl Michal, doc. Ing., Ph.D. (DCGM)
Veľas Martin, Ing., Ph.D.
Kapinus Michal, Ing., Ph.D. (DCGM)
outdoor platform, Velodyne LiDAR, stereo camera, experimental data sets, ROS, autonomous vehicle
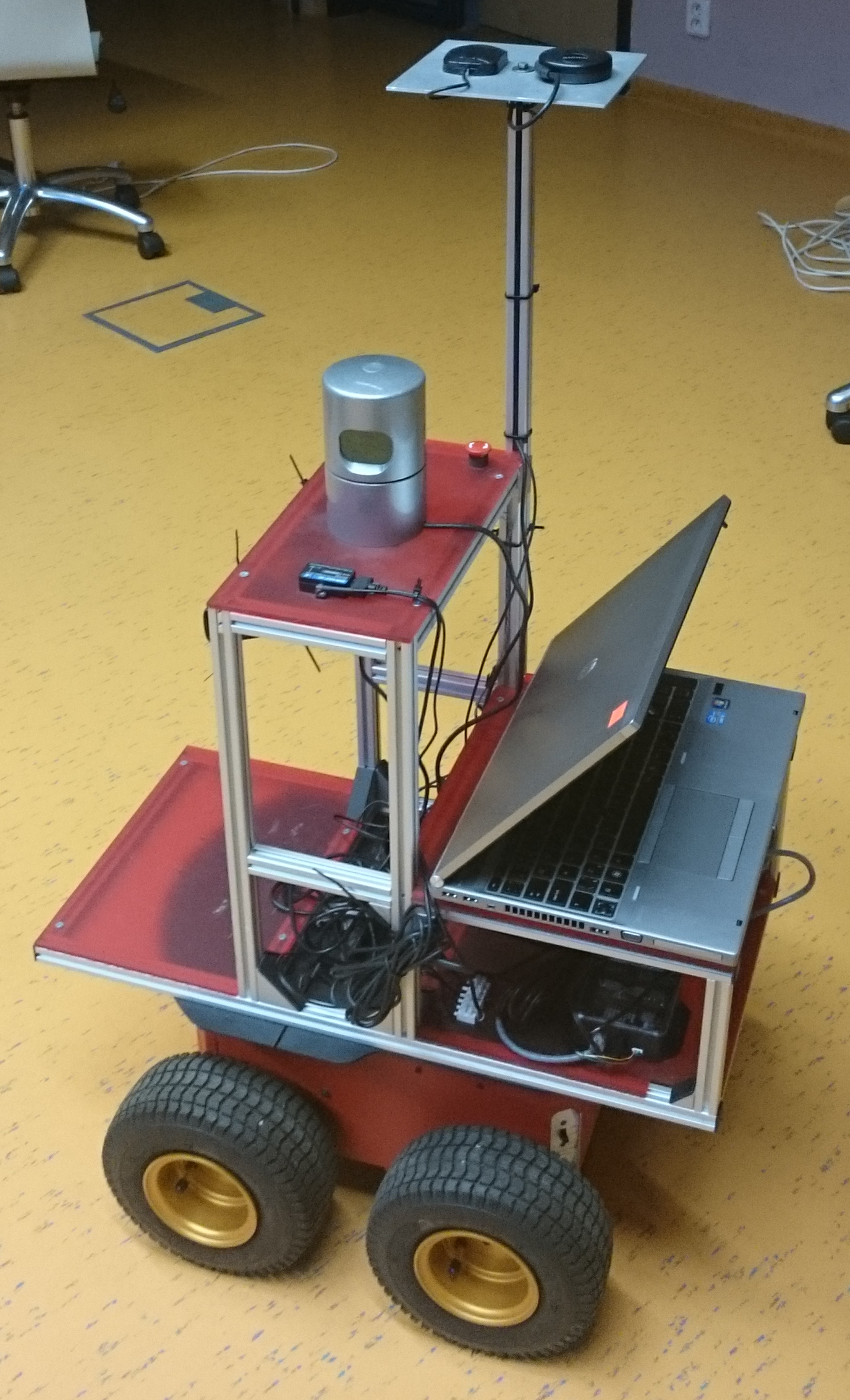
The device is a functional sample of robotic platform. It is fitted with sensors for capturing data for further analysis and evaluation of 3D mapping and reconstruction algorithms. The robot built on top of Pioneer 3-AT base is usable in both indoor and outdoor conditions which for instance makes it suitable as a testing platform for autonomous driving based on sensory data processing via computer vision algorithms. The software equipment is based on meta-operating system ROS (Robot Operating System) defining structure of sensor and command messages. Prepared ROS modules provides a lot of functionality for data acquisition and analysis and allows easy portability of developed algorithms to another robotic platform. The robot can be controlled manually as well as autonomously by setting navigation goals in its map of imminent surroundings.
Laboratoř O104 (1. np), budova FIT VUT v Brně, Božetěchova 1, 612 66 Brno, Česká republika
For information and license conditions contact please: Mgr. Michaela Burianová, Research Centre of Information Technology, Faculty of Information Technology, Brno University of Technology, Božetěchova 2, 612 66 Brno, 541 141 470, http://www.fit.vutbr.cz/~burianova/
- png Podvozek Pioneer 3AT byl doplněn o konstrukci z hliníkových profilů a plastových desek pro montáž senzorů. Konstrukce umožňuje v zadní části umístění výpočetního a řídícího PC. Pod notebookem je prostor pro doplňkovou elektroniku a kabeláž. 3 MB
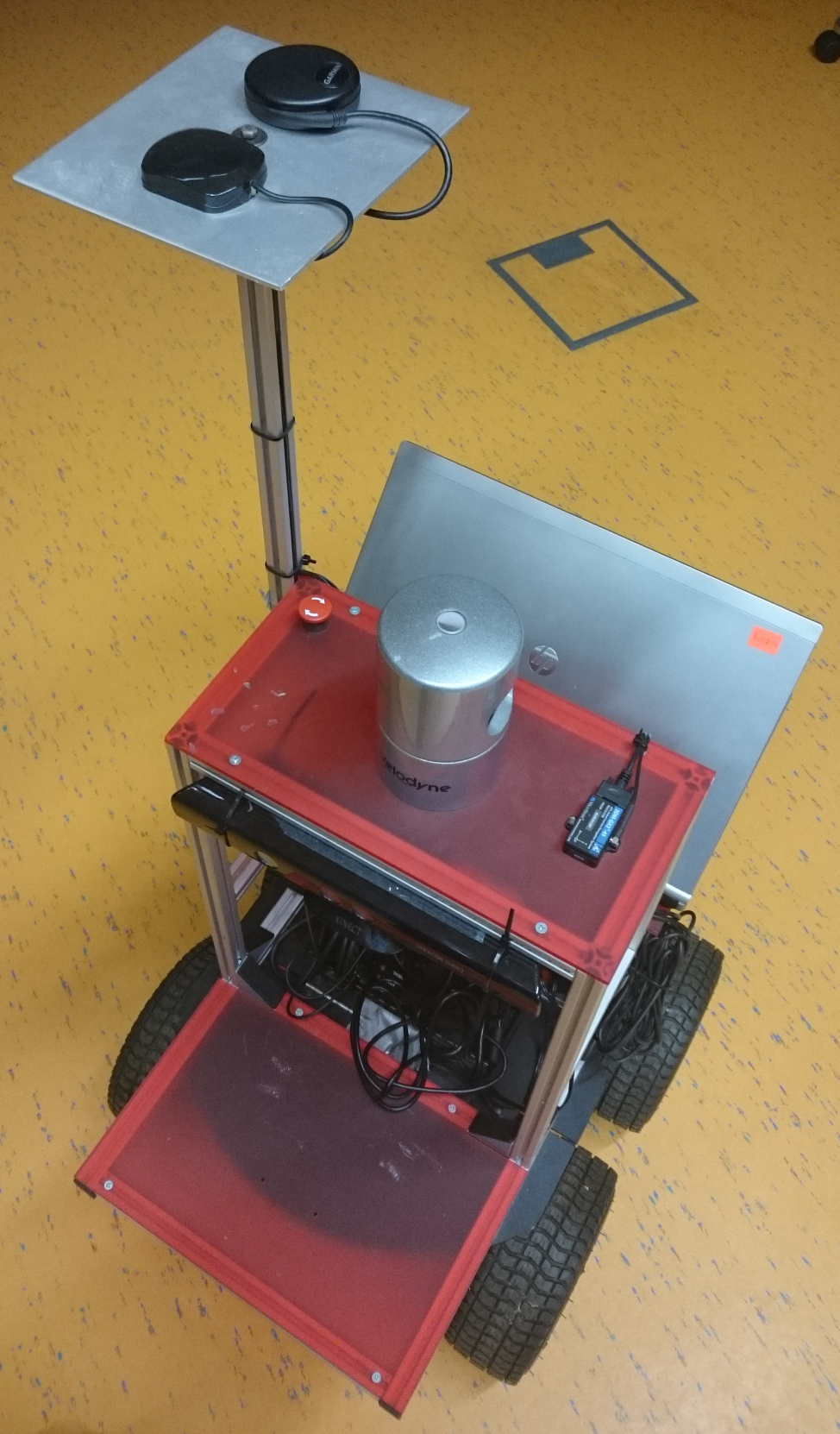
- png Z boční strany vyvýšené části je upevněn držák pro GPS anténu AHRS jednotky a GPS připojenou k senzoru Velodyne. 2 MB
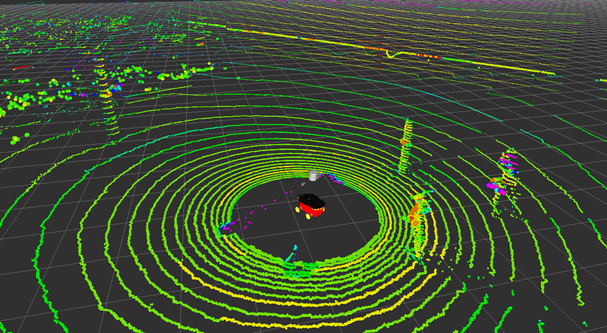
- png Vizualizace modelu robota a dat ze senzoru Velodyne. 297 kB
- png Pohled na zadní část podvozku s příhrádkou na trojici gelových akumulátorů. 444 kB
{kind=link}
{kind=link}
{kind=link}
{kind=link}