Detail výsledku
Modul inerciální navigační jednotky
Růžička Richard, doc. Ing., Ph.D., MBA, UPSY (FIT)
Chudý Peter, doc. Ing., Ph.D., MBA, UPGM (FIT)
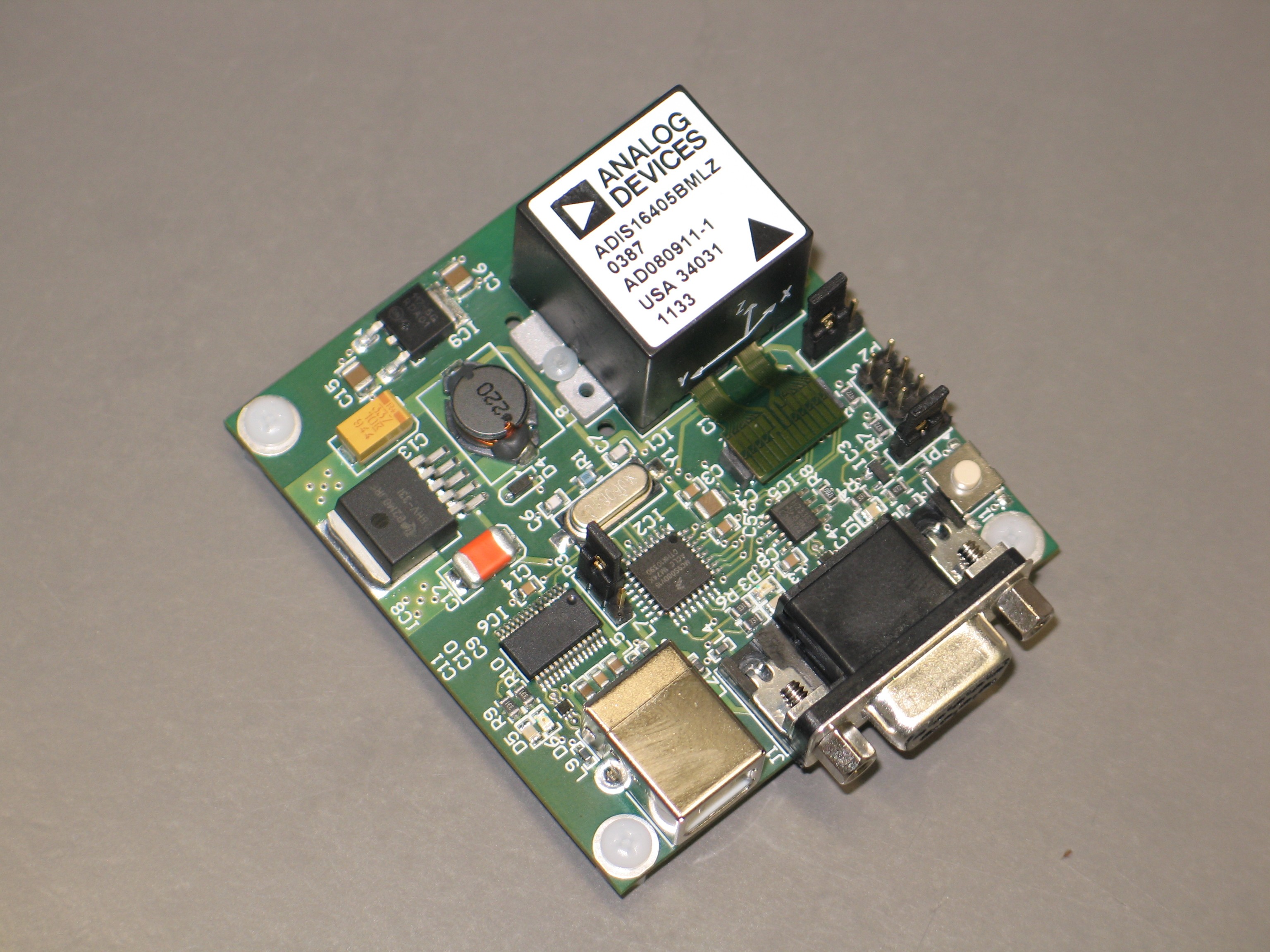
Modul inerciální navigační jednotky s USB a CAN rozhraním. Výstupem z modulu je sada veličin pro definici prostorové orientace tělesa, rychlostí a zrychlení kolem hlavních os a výstup z integrovaného magnetometru.
An inertial measurement unit module with USB and CAN interface. The output from the module features quantities defining the rigid body attitude, rate and accelerations in principal axes and an output from an integrated magnetometer.
prototypování, avionické systémy, mikrokontrolér, vývojová platforma, modulární architektura, sběrnice CAN, inerciální navigační jednotka
prototyping, avionics, microcontroller, development platform, modular architecture, CAN bus, inertial navigation unit
Laboratoř Aeroworks (místnost L209), Fakulta informačních technologií VUT v Brně, Božetěchova 2, 612 66 Brnohttp://www.fit.vutbr.cz/research/prod/index.php.cz?id=246
{kind=link}