Detail publikace
Effective Remote Drone Control Using Augmented Virtuality
Augmented Virtuality, UAV, Drone Piloting, Virtual Scene, Navigation Elements, First Person View, Third Person View.
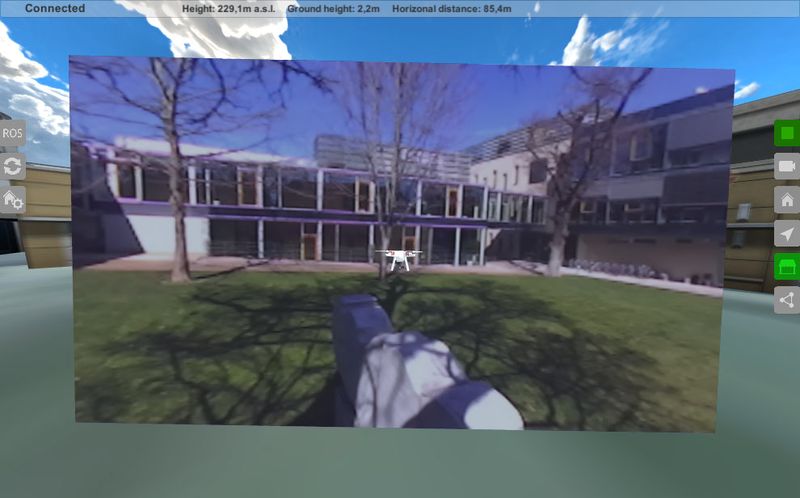
Protože dálkové ovládání dronů je z pohledu mentální zátěže pilota náročná aktivita, může podpora různých pohledů do scény: pohled první osoby (FPV) a pohled třetí osoby (TPV), zlepšit orientační schopnosti pilota během mise. Proto představujeme systém založený na technologii rozšířená virtualita , kde jsou reálná data z dronu integrována do virtuálního 3D modelu prostředí (video-stream, 3D struktury, informace o poloze). V našem systému pilot většinou pilotuje dron pomocí FPV, ale kdykoli se může přepnout na TPV, aby se mohl volně rozhlédnout v situaci s horší orientací. Navrhovaný systém také umožňuje efektivní plánování mise, kde pilot může definovat 3D oblasti s různými potenciálními bezpečnostními riziky nebo nastavit navigační body, které budou použity během mise k navigaci v definovaných zónách, a v neposlední řadě také vizualizaci celkové situace ve virtuální scéně rozšířené o reálná online data.
Výsledná aplikace byla vyvinuta pomocí herního enginu Unity. Pro vytvoření 3D virtuálního prostředí, mapy prostředí a výškové mapy se načítají z externích zdrojů, aby se v Unity vytvořil terén (mapy, 3D modely budov, textury, výšky). Dále jsou do aplikace přenášeny letové informace a data ze senzorů a vizualizovány (pozice, výška, video z kamery, stav baterie, rychlost letu, letový režim).
![[img]](https://www.fit.vut.cz/research/publication-file/12006/VSTool01-TPV.jpg)
![[img]](https://www.fit.vut.cz/research/publication-file/12006/VSTool01-3DUI.jpg)
@inproceedings{BUT159976,
author="Kamil {Sedlmajer} and Daniel {Bambušek} and Vítězslav {Beran}",
title="Effective Remote Drone Control Using Augmented Virtuality",
booktitle="Proceedings of the 3rd International Conference on Computer-Human Interaction Research and Applications 2019",
year="2019",
pages="177--182",
publisher="SciTePress - Science and Technology Publications",
address="Vienna",
doi="10.5220/0008349401770182",
isbn="978-989-758-376-6",
url="https://www.fit.vut.cz/research/publication/12006/"
}{kind=link}
{kind=link}