Licence a patenty
Podle potřeby je možné poskytnout licence na výsledky a software, které jsou na fakultě k dispozici. Tento způsob spolupráce je vhodný pro vývoj složitějších řešení s garantovanou dobou řešení a s větší finanční náročností. V případě zájmu nám zašlete odbornou oblast včetně stručného popisu problému a požadovaných výsledků. Tyto informace nebudou žádným způsobem dále šířeny a poslouží k výběru kompetentních odborníků pro další jednání ohledně spolupráce.
sAOTS

S úlohou sledování cílů jsme začali v roce 2009, kdy jsme byli spoluřešiteli projektu Ministerstva průmyslu a obchodu s názvem Výzkum a vývoj technologií pro inteligentní optické sledovací systémy. Zaměřili jsme se zde na řešení pro jednokamerový systém, pro který jsme vyvinuli aplikaci umožňující sledování vzdálených cílů. Tato aplikace umožňuje sledovat i velmi vzdálené (několik kilometrů) a mizivé cíle – a to až 50 objektů v jedné scéně, přičemž je možné označit jeden z nich jako primární.
Později jsme vytvořili jednokamerový systém se zoomem (22×), který je umístěn na vojenském manipulátoru. Tento systém jsme nazvali sAOTS (semi-Automated Object Tracking System).
V roce 2025 byla zahájena modernizace tohoto systému. Nový vývoj se zaměřuje na využití edge computingu a rychlého zpracování obrazu, což výrazně zvyšuje jeho efektivitu a použitelnost v reálném čase.
Extrakce příznaků
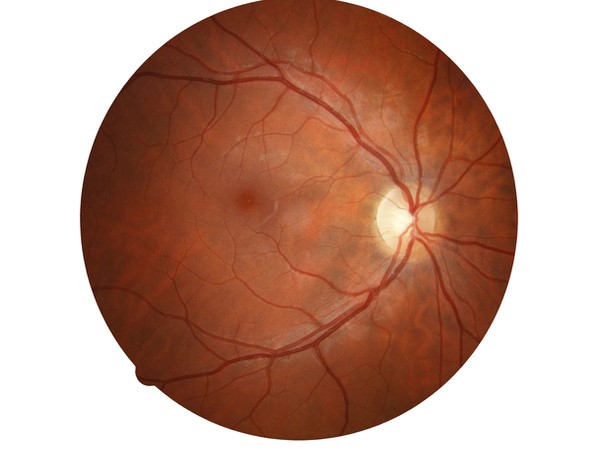
Daná softwarová aplikace slouží ke zpracování snímků sítnice oka. V obrazu sítnice oka je nalezeno žilní řečiště, detekovány žíly a extrahovány příznaky pro vygenerování biometrické šablony, která je použitelná pro porovnávání osob na základě žilního řečiště sítnice oka.
CGPAnalyzer
Softwarový nástroj CGPAnalyzer vyvinutý pro analýzu a vizualizaci genetického záznamu (tj. Log souboru) generovaného softwarem pro návrh obvodů na bázi CGP. CGPAnalyzer automaticky najde klíčová genetická zlepšení v genetickém záznamu a prezentuje relevantní fenotypy. Srovnávací modul CGPAnalyzer umožňuje uživateli vybrat dva fenotypy a porovnat jejich strukturu, historii a funkčnost. Umožňuje tak rekonstruovat proces objevování nových obvodů. Tato vlastnost je demonstrována pomocí analýzy genetického záznamu z evoluce 9-paritního obvodu. Nástroj CGPAnalyzer je desktopová aplikace s grafickým uživatelským rozhraním vytvořeným pomocí knihovny Java v.8 a Swing.