Detail produktu
Venkovní robotická platforma pro snímání senzorových dat a experimentální ověřování algoritmů 3D rekonstrukce
Vznik: 2015
Beran Vítězslav, doc. Ing., Ph.D. (UPGM)
Španěl Michal, doc. Ing., Ph.D. (UPGM)
Veľas Martin, Ing., Ph.D.
Kapinus Michal, Ing., Ph.D. (UPGM)
venkovní platforma, Velodyne LiDAR, stereo kamera, experimentální data, ROS, autonomní vozidlo
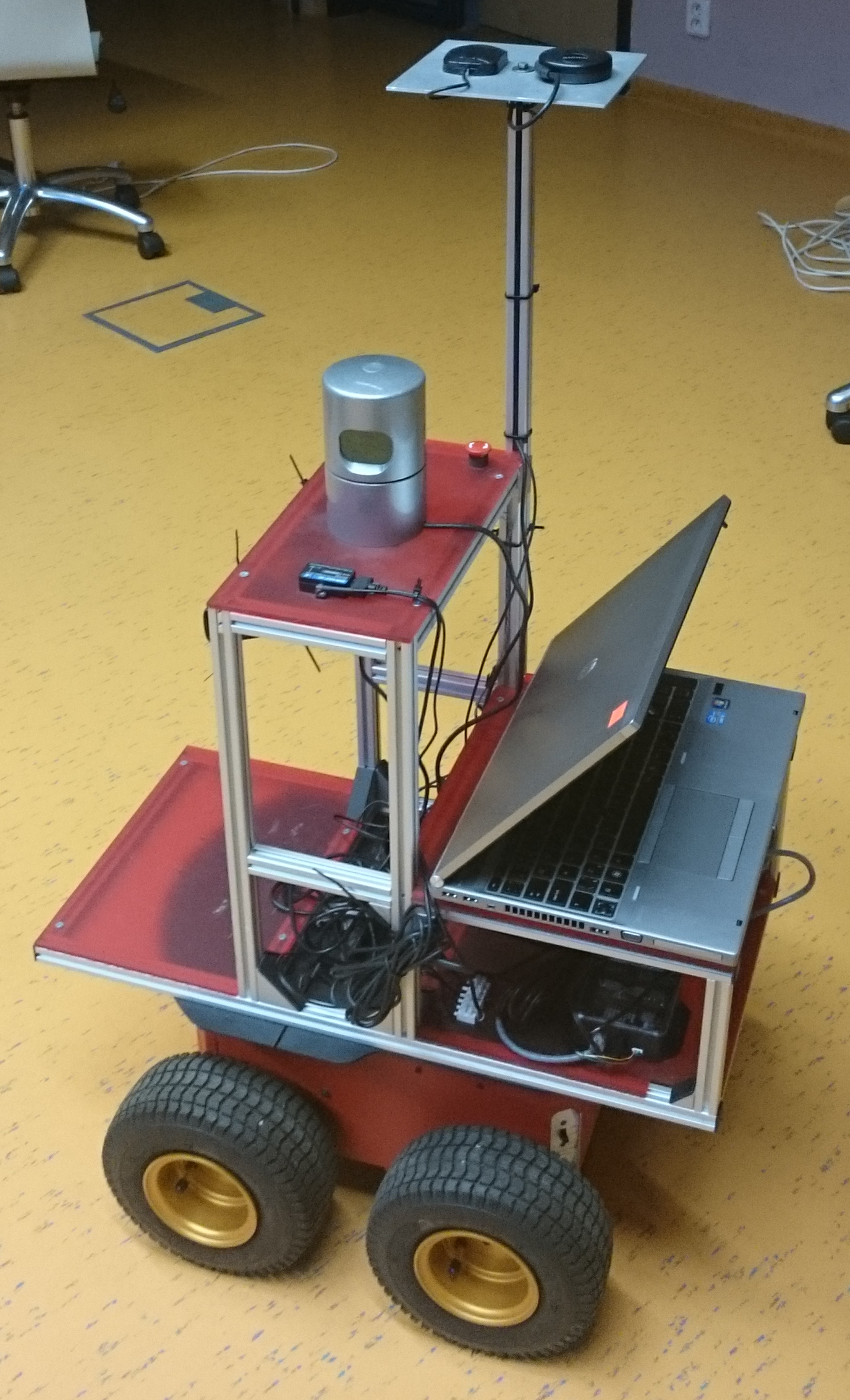
Jedná se o funkční vzorek robotické platformy vybavené senzory k získávání dat pro analýzu a ověřování algoritmů 3D rekonstrukce a mapování. Robot využívající podvozek Pioneer 3-AT je schopen pohybu ve vnitřním i venkovním prostředí a umožňuje tak například oveřovat funkčnost algoritmů počítačového vidění pro autonomní vozidla. Softwarové vybavení je založené na meta-operačním systému ROS (Robot Operating System) definujícím strukturu senzorických dat a řídicích povelů. Vytvořené moduly pro ROS obsahují nástroje pro záznam a zpracování dat a umožňují snadnou přenositelnost vyvinutých algoritmů na jiné platformy. Platformu je možné řidit jak ručně pomocí bezdrátového joysticku, tak autonomně, zadáním cíle v mapě bezprostředního okolí.
Laboratoř O104 (1. np), budova FIT VUT v Brně, Božetěchova 1, 612 66 Brno, Česká republika
Pro informace o licenčních podmínkách prosím kontaktujte: Mgr. Michaela Burianová, Výzkumné centrum informačních technologií, Fakulta informačních technologií VUT v Brně, Božetěchova 2, 612 66 Brno, 541 141 470, http://www.fit.vutbr.cz/~burianova/
- png Podvozek Pioneer 3AT byl doplněn o konstrukci z hliníkových profilů a plastových desek pro montáž senzorů. Konstrukce umožňuje v zadní části umístění výpočetního a řídícího PC. Pod notebookem je prostor pro doplňkovou elektroniku a kabeláž. 3 MB
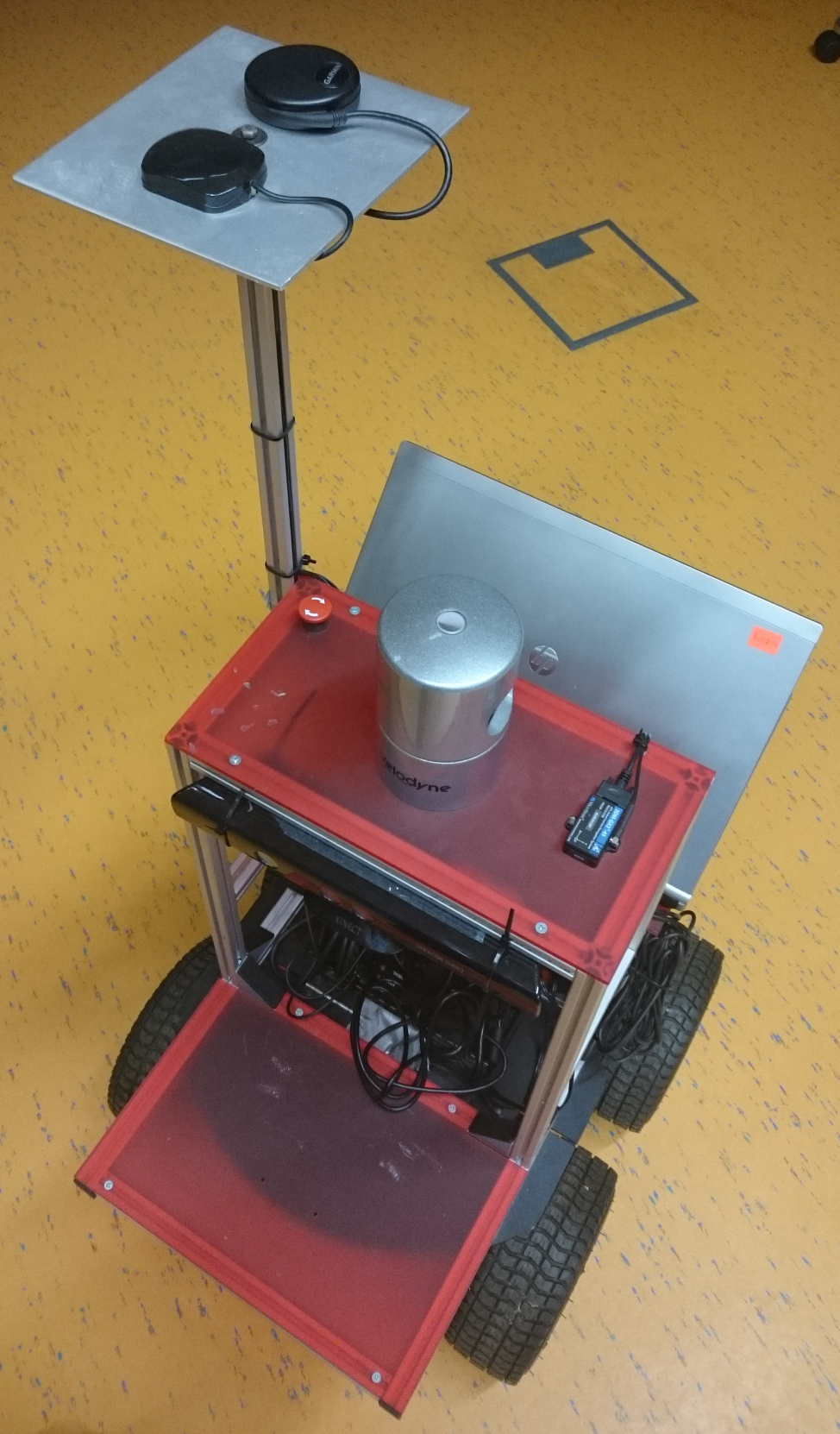
- png Z boční strany vyvýšené části je upevněn držák pro GPS anténu AHRS jednotky a GPS připojenou k senzoru Velodyne. 2 MB
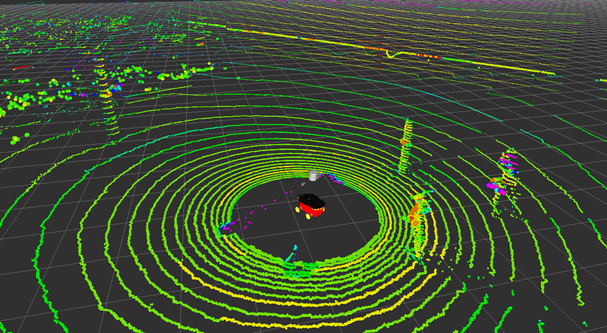
- png Vizualizace modelu robota a dat ze senzoru Velodyne. 297 kB
- png Pohled na zadní část podvozku s příhrádkou na trojici gelových akumulátorů. 444 kB
{kind=link}
{kind=link}
{kind=link}
{kind=link}