Detail výsledku
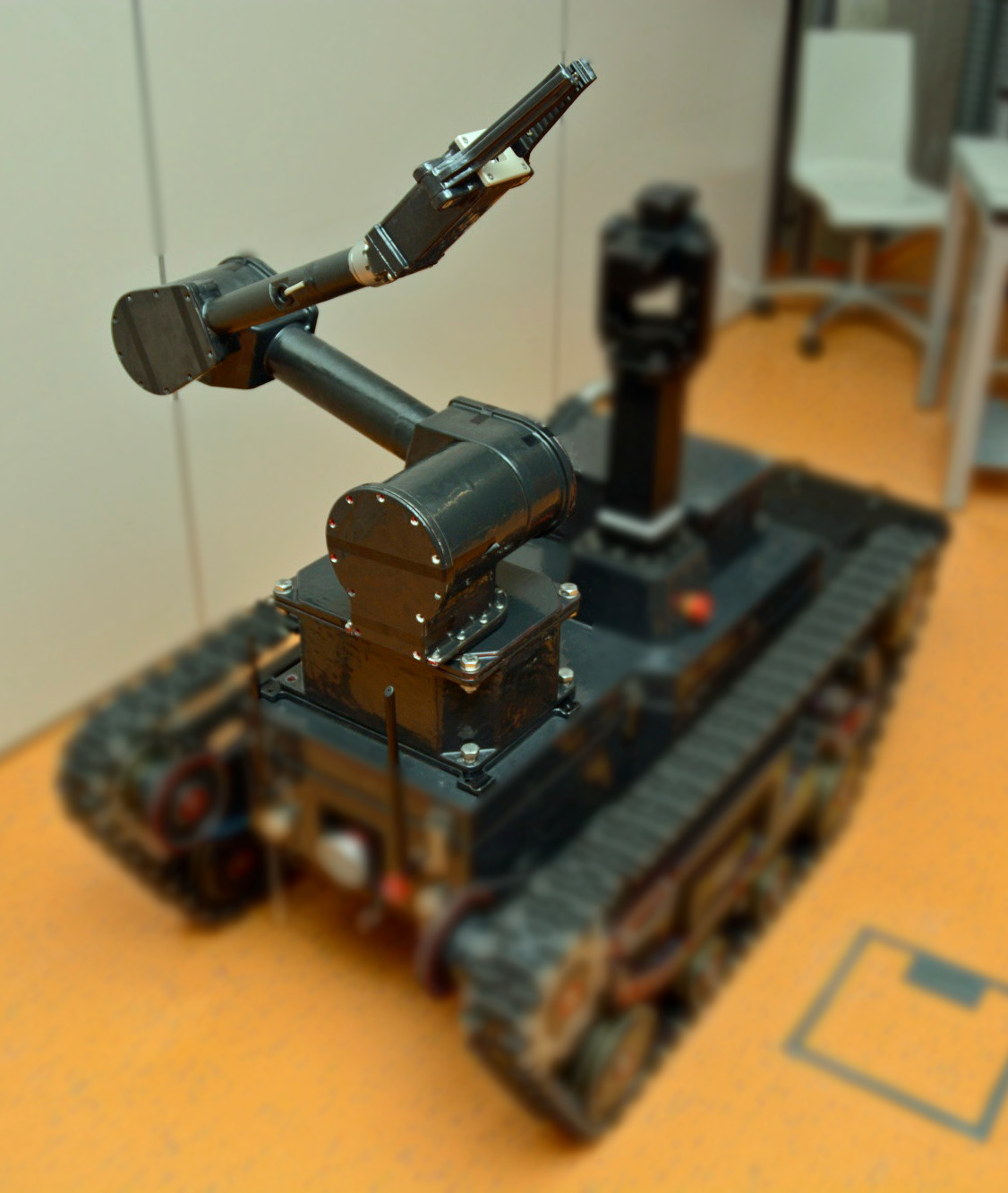
Funkční vzorek manipulátoru robota
Vznik: 2013
Název anglicky
Functional model of robot manipulator
Typ
funkční vzorek
Jazyk
česky
Autoři
Drahanský Martin, prof. Ing., Ph.D., RE-OPPaTT (RE), UITS (FIT)
Orság Filip, Ing., Ph.D., UIFS (FIT), UITS (FIT)
Váňa Jan, Ing., UIFS (FIT), UITS (FIT)
Hájek Josef, Ing., Ph.D., RE-OPPaTT (RE), UITS (FIT)
Marvan Aleš, Ing., RE-OPPaTT (RE), UITS (FIT)
Novotný Tomáš, Ing., RE-OPPaTT (RE), UITS (FIT)
Orság Filip, Ing., Ph.D., UIFS (FIT), UITS (FIT)
Váňa Jan, Ing., UIFS (FIT), UITS (FIT)
Hájek Josef, Ing., Ph.D., RE-OPPaTT (RE), UITS (FIT)
Marvan Aleš, Ing., RE-OPPaTT (RE), UITS (FIT)
Novotný Tomáš, Ing., RE-OPPaTT (RE), UITS (FIT)
Popis
Jedná se o funkční vzorek manipulátoru robotické platformy projektu "Robot pro hledání osob v závalech a lavinách", MVČR VG20102014024.
Popis anglicky
This is a functional model of the robot platform manipulator of the project "Robot for search of human beings in incrushes and avalanches", MoI CZ VG20102014024.
Klíčová slova
robotická platforma, manipulátor, funkční vzorek
Klíčová slova anglicky
robot platform, manipulator, functional model
URL
Licence
K využití výsledku jiným subjektem je vždy nutné nabytí licence
Licenční poplatek
Poskytovatel licence na výsledek požaduje licenční poplatek
Licenční podmínky
Pro informace o licenčních podmínkách prosím kontaktujte: Mgr. Michaela Kavková, Výzkumné centrum informačních technologií, Fakulta informačních technologií VUT v Brně, Božetěchova 2, 612 66 Brno, 541 141 470
Soubory
{kind=link}
Projekty
Robot pro hledání osob v závalech a lavinách, MV, Program bezpečnostního výzkumu České republiky 2010 - 2015, VG20102014024, zahájení: 2010-10-01, ukončení: 2014-07-31, ukončen
Výzkumné skupiny
Security Technology Research and Development (VZ STRaDe)
Výzkumná skupina robotiky Robo@FIT (VZ ROBO)
Výzkumná skupina robotiky Robo@FIT (VZ ROBO)
Pracoviště
Ústav inteligentních systémů
(UITS)